Fitur penargetan target manuver. Pelacakan tujuan otomatis Daftar disertasi yang direkomendasikan
Sebagai hasil dari pemrosesan awal informasi radar, dua aliran tanda target diterima pada input algoritma pelacakan otomatis:
“target sebenarnya”, yang dikelompokkan mendekati posisi sebenarnya dari target;
“target palsu”, yang satu bagiannya terikat pada area gangguan dan pantulan dari objek lokal, dan bagian lainnya didistribusikan secara merata ke seluruh area pandang stasiun.
Jika diputuskan bahwa sekumpulan tanda tertentu, yang masing-masing diterima dalam survei radarnya sendiri, termasuk dalam lintasan yang sama, maka tugas selanjutnya adalah memperkirakan parameter lintasan tersebut, yang terdiri dari penghitungan parameter yang dibahas dalam paragraf 2.2 X 0 ,kamu 0 ,N 0 ,V X ,V kamu ,V H ,A X ,A kamu Dan A H. Jika ada dua tanda sasaran sebagai koordinat awal X 0 ,kamu 0 Dan N 0 koordinat tanda terakhir dan komponen kecepatan diterima V X , V kamu Dan V H dihitung dengan cara yang sama seperti untuk penangkapan lintasan otomatis.
Saat membedakan lebih banyak tanda, dimungkinkan untuk beralih ke model pergerakan target yang lebih kompleks dan memuluskan parameter lintasan. Smoothing dilakukan guna mengurangi pengaruh kesalahan pengukuran koordinat target radar terhadap keakuratan pelacakan. Paling sering di ACS terdapat model linier pergerakan target dan pemulusan parameter lintasan secara berurutan.
Inti dari metode pemulusan sekuensial adalah menghaluskan nilai parameter lintasan berikutnya k o6zor ditentukan dari nilai yang dihaluskan yang diperoleh ( k-1) review, dan hasil terakhir k observasi ke-. Berapapun jumlah observasi yang dilakukan, hanya perkiraan sebelumnya dan hasil observasi baru yang digunakan pada siklus perhitungan berikutnya. Pada saat yang sama, persyaratan kapasitas penyimpanan dan kecepatan perangkat keras berkurang secara signifikan.
Ekspresi akhir untuk memperhalus posisi dan kecepatan dalam survei radar ke-k adalah sebagai berikut:
Dan dalam rumus tersebut jelas bahwa nilai koordinat yang dihaluskan sama dengan jumlah yang diekstrapolasi saat ini k- pengamatan koordinat yang dihaluskan kamu* FE dan diambil dengan koefisien k penyimpangan koordinat ekstrapolasi dari hasil pengukuran.
Nilai kecepatan yang dihaluskan dalam k ulasan ke-th V * kamu K adalah jumlah kecepatan yang dihaluskan V * kamu K-1 di ( k-1) tinjauan ke-dan diambil dengan koefisien k pertambahan kecepatan yang sebanding dengan deviasi.
kamu=kamu K- kamu CE.
N
 Beras. 2.5. Menghaluskan parameter lintasan target.
Beras. 2.5. Menghaluskan parameter lintasan target.
Garis putus-putus pada Gambar 2.5 berarti lintasan target yang dihaluskan, dihitung dalam komputer ACS di k ulasan -th. Karena fakta bahwa koefisien koordinat dihaluskan k dan k terletak dalam 0...1, koordinat awal yang dihaluskan berada dalam interval kamu* CE... kamu K, dan kecepatan yang dihaluskan adalah V * kamu K-1… V * kamu K.
Telah terbukti bahwa dengan gerak lurus beraturan suatu target, kesalahan pelacakan akan minimal jika koefisien k dan k dihitung menggunakan rumus:

 (2.9)
(2.9)
Gambar 2.6 menunjukkan ketergantungan k dan k dari nomor ulasan k. Grafik pada gambar menunjukkan bahwa koefisien mendekati nol secara asimtotik. Dalam batas di kHal ini memastikan penghapusan kesalahan pelacakan target sepenuhnya. Dalam prakteknya selalu terjadi penyimpangan lintasan sasaran dari garis lurus.
Oleh karena itu, nilai koefisien k dan k penurunannya hanya sampai batas tertentu.
Pengaruh pemulusan terhadap keakuratan pelacakan target dapat dinilai secara kualitatif menggunakan Gambar 2.7. Pada bagian gerak garis lurus, kesalahan koordinat sasaran yang dihaluskan lebih kecil dibandingkan dengan koordinat sasaran yang tidak dihaluskan: ruas garis putus-putus terletak lebih dekat ke lintasan sasaran sebenarnya daripada ruas garis padat. Di area manuver, karena perbedaan antara sifat sebenarnya dari pergerakan target dan hipotetis, kesalahan pelacakan dinamis muncul. Kini ruas garis padat menentukan posisi target sebenarnya lebih akurat dibandingkan ruas garis putus-putus.
Dalam sistem kontrol otomatis pertahanan udara, ketika mengawal target non-manuver, pilihan koefisien k dan k diproduksi dengan berbagai cara: dapat dihitung ulang dari nilai awal ke nilai akhir, atau tetap tidak berubah selama seluruh periode pemeliharaan. Dalam kasus terakhir, pemulusan sekuensial optimal berubah menjadi apa yang disebut pemulusan eksponensial. Deteksi manuver target dapat dilakukan secara visual oleh operator atau secara otomatis. Dalam kedua kasus tersebut, target dianggap bermanuver jika koordinat target yang diukur berbeda dari koordinat yang diekstrapolasi dengan jumlah yang melebihi kesalahan pengukuran koordinat yang diizinkan.
Z
Beras. 2.6. Ketergantungan koefisien pemulusan pada K.
Beras. 2.7. Pengaruh parameter kelancaran lintasan terhadap keakuratan pelacakan target



Biasanya, perhitungan koordinat target saat ini (diekstrapolasi pada waktu tertentu) diatur waktunya bertepatan dengan momen keluaran informasi ke indikator, saluran komunikasi, zona memori algoritma lain, dll. Nilai prediksi koordinat target dihitung menggunakan rumus:

 (2.10)
(2.10)

Di mana T kamu- lead time, dihitung dari momen saat ini T.
Biasanya T kamu ketika menilai situasi udara, itu diatur oleh komandan, dan ketika menyelesaikan tugas pemrosesan data lainnya, itu dibaca dari memori permanen komputer ACS.
Tahap terakhir dari pelacakan target adalah memecahkan masalah mengkorelasikan tanda yang baru muncul dengan lintasan yang ada. Masalah ini diselesaikan dengan metode gerbang matematis wilayah udara. Esensinya terletak pada mesin verifikasi pemenuhan kesetaraan, dengan bantuan yang ditetapkan bahwa merek tersebut milik area yang diteliti. Dalam hal ini, strobo persegi panjang atau lingkaran paling sering digunakan. Parameternya ditunjukkan pada Gambar 2.8.
Membiarkan X Eh, kamu E - mengekstrapolasi koordinat target pada titik waktu tertentu T. Untuk mengetahui nilai mana yang diterima pada tinjauan berikutnya yang berkaitan dengan lintasan tertentu, Anda perlu memeriksa kondisi:
P
Beras. 2.8. Parameter gerbang
|X 1 -X E | X hal; | Y 1 -Y E | Y hal; (2.11)
saat menggunakan strobo melingkar -
(X Saya – X E) 2 + ( Y Saya – Y E) 2 R hal, (2.12)
Di mana X halaman, Y str - dimensi strobo persegi panjang;
R pp - ukuran strobo melingkar.
Sebagai hasil dari pencacahan semua kemungkinan pasangan “tanda lintasan”, dalam setiap tinjauan ditentukan tanda mana yang melanjutkan tanda yang sudah ada dan mana yang memulai rute baru.
Dari uraian algoritma pelacakan lintasan sasaran terlihat jelas bahwa pengolahan informasi situasi udara merupakan proses yang sangat padat karya yang membutuhkan banyak RAM dan kecepatan komputer ACS.
Manuver target yang dilacak, yang durasinya melebihi periode pembaruan informasi pada input VDU, memanifestasikan dirinya dalam munculnya komponen sistematis dalam kesalahan penyaringan dinamis.
Mari kita perhatikan, sebagai contoh, proses membangun lintasan target yang mencapai suatu titik B(Gbr. 12.15) bergerak secara merata dan lurus, dan kemudian memulai manuver dengan beban berlebih yang besar (1), sedang (2) atau kecil (3) (garis putus-putus). Berdasarkan penilaian parameter penampang lurus lintasan berdasarkan hasil penyaringan n pengukuran (ditandai dengan lingkaran pada gambar), koordinat sasaran saat ini (garis putus-putus) dan diekstrapolasi koordinat menjadi ( N Ulasan +1) (segitiga).
| A |
| B |
Terlihat dari gambar, setelah dimulainya manuver, koordinat target saat ini yang diberikan kepada konsumen akan mengandung kesalahan dinamis, yang besarnya semakin besar, semakin besar kelebihan beban target selama manuver dan periode melihat ruang.
Untuk melacak target secara otomatis dalam kondisi ini, pertama-tama perlu untuk mendeteksi (mengidentifikasi) suatu manuver dan, kedua, dengan mengabaikan hipotesis pergerakan target yang lurus dan seragam, menentukan parameter manuver dan, atas dasar ini, gunakan hipotesis baru tentang pergerakan target.
Ada sejumlah metode yang diketahui untuk mendeteksi suatu manuver berdasarkan hasil pengukuran koordinat target secara diskrit:
1. Alasan penghentian penyaringan menurut hipotesis gerak lurus beraturan mungkin karena kelebihan modulus sisa suatu nilai konstanta tertentu. Dalam hal ini, kondisi yang diperlukan untuk melanjutkan penyaringan setelah diterima N tanda ke-th dapat disajikan dalam bentuk berikut:
 ;
;  (1)
(1)
dimana: Δ P, Δ D- konstanta yang menentukan nilai perbedaan yang diizinkan dan bergantung pada periode tinjauan radar dan nilai kelebihan target yang diterima selama manuver;
P n, D n- nilai bantalan dan jangkauan yang diukur pada survei ke-n;
, - nilai bantalan dan jangkauan diekstrapolasi pada saat pengukuran ke-n.
2. Dengan persyaratan yang lebih tinggi untuk kualitas deteksi manuver pada bidang horizontal dalam kondisi pelacakan lintasan dalam sistem koordinat persegi panjang, nilai perbedaan yang diizinkan ditentukan pada setiap tinjauan dan masalahnya diselesaikan sebagai berikut:
a) berdasarkan hasil setiap pengukuran koordinat, dihitung modul sisa nilai koordinat yang diekstrapolasi dan diukur
 ;
; 
 ;
;
b) varians kesalahan pengukuran diskrit dihitung
di mana σ D, σ P- kesalahan akar rata-rata kuadrat dari pengukuran jarak dan bantalan diskrit;
c) varians kesalahan ekstrapolasi dihitung
 ,
,

d) varians kesalahan total pengukuran koordinat dan ekstrapolasi dihitung
| (5) |
e) nilai dibandingkan D Dan  , di mana koefisien yang dipilih untuk alasan memastikan kemungkinan deteksi palsu suatu manuver yang dapat diterima.
, di mana koefisien yang dipilih untuk alasan memastikan kemungkinan deteksi palsu suatu manuver yang dapat diterima.
Jika dibandingkan ternyata D>  , maka keputusan “menunggu manuver” diambil. Jika ketimpangan terpenuhi untuk kedua kalinya, maka keputusan “manuver” diambil dan penyaringan parameter lintasan sesuai hipotesis yang digunakan dihentikan.
, maka keputusan “menunggu manuver” diambil. Jika ketimpangan terpenuhi untuk kedua kalinya, maka keputusan “manuver” diambil dan penyaringan parameter lintasan sesuai hipotesis yang digunakan dihentikan.
3. Pendekatan lain untuk memilih kriteria deteksi manuver juga digunakan. Pada setiap survei dihitung fungsi autokorelasi residu koordinat kutub pada survei sebelumnya dan saat ini
 ,
,

Jika tidak ada manuver, maka Δ D n dan Δ hal independen dari tinjauan ke tinjauan dan fungsi autokorelasi dari residu kecil atau bahkan nol. Kehadiran manuver secara signifikan meningkatkan ekspektasi matematis dari produk residu. Keputusan untuk memulai manuver diambil ketika fungsi autokorelasi melebihi tingkat ambang batas tertentu.
PERTANYAAN STUDI KEDUA: Pelacakan target selama manuver.
Dalam kasus paling sederhana, ketika permulaan manuver terdeteksi setelah iradiasi target ke-(n+1) di dua titik - perkiraan koordinat dalam survei ke-n (lingkaran terbuka) dan koordinat terukur di ( N Survei ke-1) (lingkaran padat) menghitung vektor kecepatan target, yang dapat digunakan untuk menghitung koordinat saat ini dan koordinat ekstrapolasi pada ( N+2) ulasan. Selanjutnya, koordinat target yang diukur pada survei saat ini dan sebelumnya digunakan untuk menyusun lintasan target dan menghitung koordinat ekstrapolasi. Filter yang beroperasi menggunakan algoritma ini disebut ekstrapolator dua titik.
Saat menggunakan ekstrapolator seperti itu, penyimpangan koordinat yang diekstrapolasi dari posisi target sebenarnya ( L 1, L 2, L 3) dengan periode menonton yang lama dan kelebihan target yang besar selama suatu manuver bisa sangat signifikan; dalam hal ini koordinat target saat ini akan diberikan kepada konsumen dengan kesalahan yang besar. Kesalahan ekstrapolasi yang besar dapat menyebabkan tanda target berikutnya berada di luar batas strobo pelacakan otomatis. Karena biasanya terdapat tanda salah di dalam strobo, salah satunya akan dipilih dan digunakan untuk melanjutkan lintasan ke arah yang salah, dan pelacakan otomatis target sebenarnya akan terganggu.
Selama manuver berkepanjangan dengan beban berlebih yang konstan, keakuratan pelacakan target dapat ditingkatkan dengan menentukan komponen persegi panjang percepatan target dari tiga tanda pertama yang diperoleh pada bagian lintasan yang melengkung, dan selanjutnya menyaring percepatan tersebut. Masalah ini diselesaikan dengan menggunakan "α-β-γ"- filter, algoritma berulang yang untuk memperkirakan koordinat dan laju perubahannya tetap sama seperti pada "α-β"- filter, dan estimasi percepatan target, misalnya berdasarkan koordinat X setelah menerima tanda masuk N Ulasan -th dihitung dengan rumus
Perkenalan.
Bab 1. Analisis filter pelacakan lintasan target udara.
§1.1. penyaring Kalman.
§1.2. Penerapan filter Kalman untuk melacak lintasan TC menggunakan data radar pengawasan.
§ 1.3. Filter "Alpha - beta" dan "Alpha - beta - gamma".
§ 1.4. Pemodelan statistik.
§1.5. Kesimpulan.
Bab 2. Analisis metode adaptif untuk melacak lintasan manuver target udara berdasarkan detektor manuver.
§ 2.1. Perkenalan.
§ 2.2. Deteksi dan estimasi manuver target kolaboratif berdasarkan proses pembaruan.
§ 2.3. Algoritme adaptif untuk melacak kendaraan yang bermanuver
CC menggunakan detektor manuver.
§ 2.4. Kesimpulan.
Bab 3. Studi tentang algoritma multi-model yang terkenal.
§3.1. Perkenalan.
§3.2. Pendekatan Adaptif Bayes.
§3.3. Studi tentang pelacakan lintasan MMA yang terkenal dari CC untuk radar pengawasan.
§3.4. Kesimpulan.
Bab 4. Pengembangan algoritma multi-model untuk melacak * lintasan manuver target udara.
§4.1. Perkenalan.
§4.2. Estimasi vektor keadaan gerak komputer.
§4.2.1. Rumusan masalah.
54.2.2. Pendekatan umum untuk memecahkan masalah.
04.2.3. Algoritma linier.
§4.3. Perbandingan MMA dengan algoritma lain.
§4.4. Kesimpulan.
Daftar disertasi yang direkomendasikan
Pengolahan informasi sekunder pada sistem radar dua posisi dalam sistem koordinat kartesius 2004, Kandidat Ilmu Teknik Sidorov, Viktor Gennadievich
Memfilter perkiraan koordinat bola objek dalam sistem radar dua posisi 2004, Kandidat Ilmu Teknik Grebenyuk, Alexander Sergeevich
Penyediaan dukungan informasi algoritmik untuk menilai situasi dinamis dalam sistem multi-sensor selama pelacakan otomatis objek permukaan 2001, Doktor Ilmu Teknik Beskyd, Pavel Pavlovich
Pengembangan metode pemantauan lokasi pesawat penerbangan negara pada saat pengendalian lalu lintas udara di sektor off-piste wilayah udara 2009, kandidat ilmu teknik Shanin, Alexei Vyacheslavovich
Pengembangan dan penelitian metode penargetan suatu objek yang bermanuver berdasarkan prakiraan stokastik pergerakannya 2004, Calon Ilmu Teknik Truong Dang Khoa
Pengenalan disertasi (bagian dari abstrak) dengan topik “Penelitian algoritma untuk melacak lintasan target udara”
Relevansi topik disertasi
Salah satu tugas terpenting penerbangan sipil adalah meningkatkan keselamatan penerbangan, terutama pada saat lepas landas dan mendarat. Untuk mencapai tujuan ini, sistem kendali lalu lintas udara otomatis (ATC) harus memiliki indikator kualitas yang diperlukan, yang sampai batas tertentu bergantung pada kualitas informasi radar yang masuk. Dalam sistem ATC, informasi radar dari radar perjalanan dan lapangan terbang digunakan untuk mengontrol pergerakan target udara (AT), penghindaran tabrakan, dan kontrol pendekatan. Saat mengendalikan pergerakan komputer, perlu untuk menghitung koordinat saat ini dari setiap komputer untuk menghindari pendekatan komputer yang berbahaya. Jika tidak, pilot akan diberikan perintah untuk memperbaiki lintasan. Dalam mode penghindaran tabrakan, perkiraan koordinat ekstrapolasi dihasilkan, berdasarkan penentuan zona kedekatan berbahaya. Apalagi kepadatan lalu lintas udara juga meningkat dalam beberapa tahun terakhir. Peningkatan kepadatan lalu lintas udara menyebabkan peningkatan jumlah pertemuan berbahaya. Mencegah pendekatan berbahaya antar pusat pesawat adalah bagian dari tugas terpenting penerbangan sipil - memastikan keselamatan penerbangan. Saat mengontrol pergerakan pesawat selama pendekatan pendaratan, radar memeriksa kebenaran pergerakan pesawat di sepanjang lintasan yang ditentukan.
Oleh karena itu, isu peningkatan kualitas informasi radar senantiasa menarik perhatian besar. Diketahui bahwa setelah pemrosesan primer informasi radar, proses pemrosesan sekunder informasi radar (SRIP) biasanya dilakukan oleh algoritma pemrosesan digital terprogram pada komputer digital, dan kualitas aliran informasi radar sangat bergantung pada keandalan dan keakuratan algoritma pemrosesan. Tugas ini menjadi lebih relevan jika manuver pesawat selama tahap lepas landas dan pendaratan, terkait dengan perubahan level penerbangan, perubahan arah dan penerapan prosedur pendekatan standar, dll.
Mari kita pertimbangkan lokasi elemen wilayah udara di area ATC dan pendekatan pendaratan yang khas. Dalam penerbangan sipil, wilayah udara dibagi menjadi jalur udara - wilayah udara yang didirikan di atas permukaan bumi dalam bentuk koridor dengan lebar (10 - 20) km, di mana penerbangan reguler dilakukan, area lapangan terbang - wilayah udara di atas lapangan terbang dan daerah sekitarnya serta daerah terlarang - wilayah udara di mana penerbangan semua departemen dilarang.
Di area lapangan terbang, diatur koridor udara, zona lepas landas dan pendaratan serta ruang tunggu. Koridor udara adalah bagian wilayah udara tempat pesawat turun dan memperoleh ketinggian. Zona lepas landas dan mendarat adalah wilayah udara mulai dari tingkat lapangan terbang sampai dengan ketinggian tingkat penerbangan aman kedua. Dimensi zona ini ditentukan oleh karakteristik kinerja penerbangan dari komputer yang dioperasikan pada suatu bandar udara tertentu, kemampuan alat bantu radio-teknis untuk navigasi dan pendaratan kontrol lalu lintas udara, skema pendekatan dan ciri-ciri khusus wilayah bandar udara. Biasanya, batas zona lepas landas dan pendaratan berjarak 25,30 km dari lapangan terbang. Jika karena sebab tertentu pilot tidak mendaratkan pesawat pada pendekatan pertama, maka pesawat masuk ke lingkaran kedua, yaitu bergerak sepanjang jalur khusus di area lingkaran (lihat Gambar B.1). Apabila CC tidak diperbolehkan bergerak sepanjang rute pendekatan karena ditempati sementara atau tidak tersedianya landasan pacu (runway), maka CC dikirim ke holding area yang dimaksudkan untuk menunggu izin pendekatan ke lapangan terbang. Zona-zona ini terletak di atas lapangan terbang atau 50 - 100 km darinya (Gbr. B.1). Dengan demikian, di area lapangan terbang frekuensi manuver komputer tinggi. Hal ini dijelaskan oleh fakta bahwa terdapat kepadatan komputer yang tinggi di area ini, dan untuk menjaga rute dan jarak tertentu, mereka selalu berpindah dari satu zona ke zona lainnya.
1 - rute; 2 - koridor area lapangan terbang; 3 - area lingkaran; 4 zona lepas landas dan mendarat;
5 - ruang tunggu.
Selain itu, untuk meningkatkan keselamatan pesawat dan penumpang saat mendarat, skema pendekatan “kotak” saat ini banyak digunakan, di mana pesawat harus merencanakan (1-2) lingkaran di atas lapangan terbang sebelum mendarat (Gbr. B.2) . Pola ini terdiri dari beberapa bagian lurus dan empat putaran 90 derajat.
Beras. PADA 2. Skema pendekatan "kotak".
Di sisi lain, keadaan dan perkembangan teknologi komputer memungkinkan penerapan algoritma yang lebih kompleks dan efisien untuk memproses informasi radar guna meningkatkan keakuratan perkiraan koordinat dan kecepatan komputer.
Dengan demikian, studi tentang algoritma untuk melacak lintasan TC yang meningkatkan kualitas informasi radar merupakan masalah yang mendesak.
Saat memproses informasi radar, tugas yang sangat mendesak adalah mempelajari algoritma pemrosesan di area manuver CC, yang menyebabkan ketidaksesuaian antara pergerakan CC yang sebenarnya dan model gerak yang digunakan dalam algoritma. Akibatnya keakuratan hasil estimasi menurun dan informasi radar yang diperoleh menjadi tidak dapat diandalkan. Pendekatan yang diketahui untuk meningkatkan keakuratan pelacakan lintasan komputer di bagian manuver terutama didasarkan pada pemecahan masalah dalam mendeteksi awal dan akhir manuver dan dengan demikian mengubah parameter filter pelacakan. Pendekatan ini mengarah pada skema filter "alpha - beta" dan "alpha - beta - gamma", atau filter Kalman (KF) yang dikombinasikan dengan detektor manuver.
Diketahui bahwa dalam teori deteksi dan estimasi, pendekatan Bayesian adaptif juga dapat digunakan untuk menyelesaikan ketidakpastian apriori. Saat memfilter dalam ruang keadaan, pendekatan ini terdiri dari memperhitungkan semua kemungkinan varian model keadaan, dan dengan setiap varian, probabilitas posteriornya dihitung. Penerapannya untuk memecahkan masalah pelacakan lintasan komputer yang bermanuver telah dikembangkan dalam beberapa tahun terakhir. Dalam hal ini, lintasan TC digambarkan secara bersamaan oleh beberapa model dan diasumsikan bahwa proses transisi antar model dijelaskan oleh rantai Markov yang terhubung secara sederhana. Dalam literatur, satu opsi telah diusulkan untuk membuat algoritma seperti itu berdasarkan perkiraan Gaussian untuk kepadatan probabilitas apriori dari vektor keadaan. Esensinya adalah menggabungkan hipotesis model yang mungkin, dan algoritma yang dihasilkan disebut “algoritma multi-model” (MMA).
Disertasi ini menganalisis pendekatan-pendekatan yang disebutkan di atas, menunjukkan kelebihan dan kekurangannya, dan mengembangkan MMA baru. Berbeda dengan MMA yang terkenal, algoritma yang diusulkan dibuat berdasarkan perkiraan Gaussian untuk kepadatan probabilitas posterior dari vektor keadaan VC; menurut ini, algoritma yang dihasilkan memiliki keunggulan dibandingkan algoritma adaptif yang dikenal. Hasil pemodelan statistik menunjukkan bahwa algoritma yang diteliti memungkinkan untuk meningkatkan akurasi memperkirakan lokasi komputer dibandingkan dengan FC adaptif dan MMA yang diketahui saat melacak lintasan komputer yang bermanuver. Hasil penelitian menunjukkan bahwa biaya penghitungan FC sederhana pertama berkurang dibandingkan dengan FC kedua yang disederhanakan dan diperluas, sementara keakuratan memperkirakan koordinat dan kecepatan komputer meningkat sebesar (30-50)% dibandingkan dengan filter “alfa - beta” dan “alfa - beta - gamma. Oleh karena itu, penggunaan FC pertama yang disederhanakan untuk menemani lintasan CC non-manuver lebih disukai.
Maksud dan tujuan pekerjaan
Tujuan dari pekerjaan disertasi ini adalah untuk mempelajari dan menganalisis algoritma untuk melacak lintasan TC, mengembangkan MMA baru dan membandingkan MMA yang dihasilkan dengan algoritma adaptif yang diketahui. Sesuai dengan tujuan yang telah ditetapkan, tugas-tugas berikut diselesaikan dalam karya disertasi:
Kajian teori umum estimasi dalam ruang keadaan, dan penerapannya dalam menyaring lintasan pergerakan komputer.
Analisis filter “alpha - beta” dan “alpha - beta - gamma” dan metode untuk memilih faktor penguatannya di bagian manuver dan non-manuver.
Studi FC adaptif untuk melacak lintasan komputer manuver dengan detektor momen dimulainya manuver.
Estimasi optimal dalam ruang keadaan dengan vektor keadaan yang diperluas, yang mencakup, selain vektor parameter keadaan, parameter yang tidak diketahui yang menentukan semua kemungkinan varian model keadaan.
Studi tentang MMA yang diketahui dan pengembangan MMA baru untuk melacak komputer yang bermanuver berdasarkan deskripsi lintasan komputer secara bersamaan oleh beberapa model, yang merupakan keadaan rantai Markov yang terhubung secara sederhana.
Metode penelitian
Penelitian teoretis dan pembuatan algoritma untuk melacak lintasan VC dilakukan berdasarkan teori penyaringan proses Markov bersyarat dalam waktu diskrit. Algoritma yang dihasilkan dianalisis berdasarkan pemodelan statistik. Kebaruan ilmiah dari karya ini terletak pada hal berikut: MMA telah dikembangkan untuk menggambarkan lintasan VC secara bersamaan menggunakan beberapa model untuk rantai Markov yang terhubung secara sederhana.
Keandalan hasil pekerjaan yang diperoleh dikonfirmasi oleh hasil pemodelan statistik.
Signifikansi praktis dari hasil kerja
Algoritme untuk melacak lintasan komputer manuver telah dikembangkan dan dipelajari, sehingga meningkatkan akurasi pelacakan di bagian manuver.
Persetujuan hasil kerja dan publikasi
Hasil ilmiah utama dari karya ini dipublikasikan dalam artikel di jurnal “Radio Engineering”, “Electronic Journal Proceedings of the MAI” dan “Aerospace Instrumentation”, dan dipresentasikan pada konferensi internasional ke-5 “Digital Processing and Its Application” (Moskow , 2003), pada konferensi dan pameran internasional “Aviation and Cosmonautics 2003” (MAI 2003). Ruang lingkup dan struktur pekerjaan
Disertasi terdiri dari pendahuluan, empat bab, kesimpulan dan daftar referensi. Karya tersebut berisi 106 halaman teks. Daftar pustaka mencakup 93 judul. Pada bab pertama, beberapa metode yang ada untuk melacak lintasan komputer yang tidak bermanuver dan bermanuver lemah dalam masalah pengendalian lalu lintas udara ditinjau dan dianalisis. Bab kedua menganalisis algoritma adaptif yang terkenal untuk melacak target manuver, yang didasarkan pada penggunaan detektor manuver dan koreksi parameter atau struktur filter. Bab ketiga menganalisis keadaan MMA dalam sistem kontrol lalu lintas udara. Bab keempat mengusulkan pendekatan umum untuk membangun algoritma multi-model untuk masalah kontrol lalu lintas udara ketika menggambarkan kemungkinan model pergerakan pusat lalu lintas udara melalui rantai Markov yang terhubung secara sederhana.
Disertasi serupa dalam spesialisasi "Teknik radio, termasuk sistem dan perangkat televisi", 05.12.04 kode VAK
Metode dan algoritma pemrosesan informasi dalam sistem penglihatan radio otonom selama penerbangan pesawat di ketinggian rendah 2006, Doktor Ilmu Teknik Klochko, Vladimir Konstantinovich
Metode untuk meningkatkan akurasi pengukuran sudut pada sistem radio dengan kontrol pancaran antena gabungan 2011, Kandidat Ilmu Teknik Razin, Anatoly Anatolyevich
Sintesis sistem kendali pesawat untuk pemantauan dan penggunaan bahan pemadam kebakaran 2012, Kandidat Ilmu Teknik Antipova, Anna Andreevna
Algoritma untuk memperkirakan koordinat dan parameter navigasi target udara dalam radar multi-posisi berdasarkan filter Kalman 2015, kandidat ilmu teknik Masharov, Konstantin Viktorovich
Metode invarian untuk sintesis sistem rekayasa radio dalam basis dimensi terbatas dan penerapannya dalam pengembangan sistem pelacakan radar 1999, Doktor Ilmu Teknik Volchkov, Valery Pavlovich
Kesimpulan disertasi dengan topik “Teknik radio, termasuk sistem dan perangkat televisi”, Nguyen Chong Luu
§4.4. kesimpulan
Dalam bab ini, pendekatan umum untuk membangun algoritma multi-model diusulkan untuk menggambarkan kemungkinan model pergerakan pusat komputer berdasarkan keadaan rantai Markov yang terhubung secara sederhana dan hasil berikut diperoleh.
Berdasarkan teori umum penyaringan proses Markov bersyarat, sebuah algoritma dibuat di mana vektor parameter yang disaring tidak hanya mencakup parameter pergerakan target, tetapi juga parameter yang tidak diketahui yang menentukan kemungkinan model pergerakan target. Akibatnya, algoritma yang dihasilkan menjadi suboptimal, yang ditentukan oleh pendekatan Gaussian untuk kepadatan probabilitas posterior.
Sehubungan dengan pelacakan lintasan komputer yang bermanuver, algoritma yang dihasilkan disimulasikan untuk kasus M=2. Hasil penelitian menunjukkan bahwa pada bagian lintasan manuver, algoritma dua dimensi yang diteliti meningkatkan akurasi estimasi lokasi sebesar (30 - 60)% dibandingkan dengan algoritma yang diketahui. Namun, peningkatan kualitas pemfilteran dicapai dengan meningkatkan biaya komputasi.
KESIMPULAN
Dalam karya disertasi ini dipelajari algoritma pelacakan lintasan TC berdasarkan data radar pengawasan. Hasil yang diperoleh memungkinkan kita untuk mengevaluasi kelebihan dan kekurangan masing-masing algoritma pemeliharaan. Dalam disertasinya, algoritma dipelajari dan dikembangkan untuk menghindari pendekatan berbahaya dan meningkatkan akurasi estimasi baik koordinat maupun kecepatan komputer. Diketahui bahwa pemrosesan sekunder informasi radar (SRIP) biasanya dilakukan dengan menggunakan komputer digital atau peralatan digital. Dalam beberapa tahun terakhir, terjadi perkembangan pesat dalam teknologi komputer, mikroprosesor, basis elemen teknologi digital, khususnya VLSI, FPGA, dan bahasa deskripsi perangkat keras dan sistem, seperti URUL, ASHEL, dll. Ada kecenderungan untuk memperkenalkan VLSI menciptakan sistem terbuka berdasarkan standar internasional, termasuk sistem VORI. Hal ini memungkinkan untuk mempelajari algoritma yang lebih kompleks untuk melacak lintasan komputer secara real time. Karya yang disajikan mempelajari berbagai algoritma untuk melacak komputer yang tidak bermanuver dan bermanuver berdasarkan pemodelan statistik. Berikut hasil yang diperoleh dalam disertasi:
1. Filter "Alpha - beta" dan "alpha - beta - gamma" telah dipelajari, dan varian dalam memilih faktor penguatannya saat menyertai lintasan CC telah diusulkan. Filter “Alpha - beta” dan “alpha - beta - gamma” memungkinkan untuk mengurangi biaya komputasi dan menyederhanakan prosedur untuk melacak lintasan TC, namun, keduanya secara bersamaan menurunkan kualitas pelacakan sebesar (30 - 40)% tergantung pada rentang , kecepatan dan jumlah pengamatan dibandingkan dengan filter konvensional.
2. Masalah penyaringan nonlinier telah dipelajari, ketika radar pengawasan mengukur koordinat kutub CC, dan vektor yang disaring mencakup parameter gerak dalam sistem koordinat Cartesian. Filter Kalman yang disederhanakan, yang mengubah koordinat pengukuran dari sistem kutub ke sistem Cartesian, dan filter Kalman yang diperluas, yang secara linear mendekati persamaan pengukuran dengan menghilangkan suku-suku orde tinggi dari deret Taylor, diusulkan. Hasil analisis menunjukkan bahwa filter Kalman kedua yang disederhanakan dan diperluas memberikan hasil yang sama dalam hal keakuratan estimasi posisi dan kecepatan, namun dari segi biaya komputasi, filter Kalman sederhana kedua lebih ekonomis.
3. Algoritma adaptif diusulkan berdasarkan deteksi sendi dan evaluasi manuver CC. Masalah deteksi manuver termasuk dalam kelas masalah pendeteksian sinyal berguna dengan latar belakang derau Gaussian putih. Dalam hal ini, sinyal berguna yang terdeteksi adalah ekspektasi matematis dari proses pembaruan, yang berbeda dari nol dengan adanya manuver. Saat memecahkan masalah dalam mendeteksi suatu manuver, kami menggunakan metode rasio kemungkinan, dan untuk memperkirakan intensitasnya, kami akan menganggap percepatan sebagai proses non-acak; oleh karena itu, untuk mensintesis penduga, perlu menggunakan maksimum kriteria kemungkinan. Untuk menemani komputer yang bermanuver, setelah mendeteksi suatu manuver, parameter atau struktur filter diubah.
4. Algoritme multi-model adaptif telah diteliti dan dikembangkan, yang memperhitungkan semua kemungkinan model yang sesuai dengan lintasan pergerakan VC. Oleh karena itu, selain memperkirakan parameter vektor gerak, perlu juga memperkirakan probabilitas posterior semua model. Estimasi koordinat VC saat ini dibentuk sebagai jumlah estimasi tertimbang relatif terhadap semua model berdasarkan probabilitas posterior. Hal ini memungkinkan algoritme pelacakan bereaksi terhadap manuver segera setelah manuver dimulai. Untuk membuat algoritma multi-model adaptif, parameter yang tidak diketahui yang menentukan salah satu dari M kemungkinan model pergerakan komputer pada setiap momen waktu dijelaskan oleh rantai Markov yang terhubung secara sederhana. Hasilnya, algoritma yang dihasilkan dibuat dari sekumpulan filter Kalman paralel M2. Hasil simulasi untuk kasus M = 2 menunjukkan bahwa pada bagian lintasan manuver, algoritma dua dimensi yang diteliti meningkatkan akurasi estimasi lokasi TC sebesar (30 - 60)% dibandingkan dengan algoritma yang diketahui. Namun, peningkatan kualitas pemfilteran dicapai dengan meningkatkan biaya komputasi.
5. Program eksperimental yang dikembangkan pada komputer digital memungkinkan untuk mengevaluasi kelebihan dan kekurangan algoritma, yang menjadi dasar penentuan kemungkinan penerapannya dalam kondisi tertentu.
Daftar referensi penelitian disertasi Kandidat Ilmu Teknik Nguyen Chong Luu, 2004
1. Farina A., Studer F. Pemrosesan informasi radar secara digital. Per. dari bahasa Inggris -M.: Radio dan Komunikasi, 1993, 319 hal.
2. Sage E., Mele J. Teori evaluasi dan penerapannya dalam komunikasi dan manajemen. Per. dari bahasa Inggris -M.: Komunikasi, 1976, 496 hal.
3. Bakulev P. A., Stepin V. M. Metode dan perangkat untuk pemilihan target bergerak. M.: Radio dan Komunikasi, 1986, 288 hal.
4. Kuzmin S. 3. Radar digital. Rumah penerbitan KV1Ts, Kyiv 2000, 426 hal.
5. Sosulin Yu.G. Landasan teori navigasi radar dan radio. -M.: Radio dan Komunikasi, 1992, 303 hal.
6. Bakut P. A., Zhulina Yu.V., Ivanchuk N. A. Deteksi benda bergerak. M.: Radio Soviet, 1980, 287 hal.
7. Kuzmin S. 3. Pemrosesan digital informasi radar. M.: Burung hantu. radio, 1967,399 hal.
8. Kuzmin S. 3. Dasar-dasar teori pemrosesan digital informasi radar. M.: Burung hantu. radio, 1974, 431 hal.
9. Kuzmin S. 3. Dasar-dasar perancangan sistem pemrosesan digital informasi radar. M.: Radio dan Komunikasi, 1986, 352 hal.
10. Yu.Sosulin Yu.G. Teori deteksi dan evaluasi sinyal stokastik. M.: Burung hantu. Radio, 1978, 320 hal.
11. P. Shirman Ya.D., Manzhos V. N. Teori dan teknologi pemrosesan informasi radar dengan latar belakang interferensi. M.: Radio dan Komunikasi, 1981, 416 hal.
12. Tikhonov V.I.Teknik radio statistik. M.: Radio dan Komunikasi, 1982, 624 hal.
13. Z. Tikhonov V. I., Kharisov V. N. Analisis statistik dan sintesis perangkat dan sistem teknik radio. M.: Radio dan Komunikasi, 1991, 608 hal.
14. M. Bochkarev A. M., Yuryev A. N., Dolgov M. N., Shcherbinin A. V. Pemrosesan digital informasi radar // Elektronik radio asing. Nomor 3, 1991, hal. 3 22.
15. Puzyrev V.A., Gostyukhina M.A. Algoritma untuk memperkirakan parameter gerak pesawat // Elektronik radio asing, No. 4, 1981, hal. 3-25.
16. Gritsenko N. S., Kirichenko A. A., Kolomeitseva T. A., Loginov V. P., Tikhomirova I. G. Estimasi parameter gerak objek manuver // Elektronik radio asing, No. 4, 1983, hal. 3 30.
17. Detkov A. N. Optimalisasi algoritma untuk penyaringan digital informasi lintasan saat melacak target manuver // Radio engineering, 1997, No. 12, p. 29-33.
18. Zhukov M. N., Lavrov A. A. Meningkatkan akurasi pengukuran parameter target menggunakan informasi tentang manuver pembawa radar // Radio engineering, 1995, No. 11, p. 67 - 71.
19. Bulychev Yu.G., Burlai I. V. Estimasi kuasi-optimal dari parameter lintasan objek yang dikendalikan // Teknik radio dan elektronik, 1996, Vol.41, No.3, hal. 298-302.
20. Bibika V.I., Utemov S.V. Filter untuk melacak manuver target siluman // Teknik radio, 1994, No. 3, hal. 11-13.
21. Merkulov V.I., Drogapin V.V., Vikulov O.V. Sintesis inclinometer radar untuk melacak target yang bermanuver secara intensif // Radio engineering, 1995, No. 11, p. 85 91.
22. Merkulov V.I., Dobykin V.D. Sintesis algoritma untuk identifikasi pengukuran yang optimal selama pelacakan otomatis objek di udara dalam mode tinjauan // Teknik radio dan elektronik, 1996, Vol.41, No.8, hal. 954-958.
23. Merkulov V.I., Khalimov N.R. Deteksi manuver target dengan koreksi algoritma untuk berfungsinya sistem pelacakan otomatis // Teknik radio, 1997, No. 11, hal. 15-20.
24. Bar-Shalom Y., Berver G., Johnson S. Penyaringan dan kontrol stokastik dalam sistem dinamis. Ed. Leondes K.T.: Per. dari bahasa Inggris M.: Mir. 1980, 407 hal.
25. Rao S.R. Metode statistik linier dan penerapannya : Transl. dari bahasa Inggris -M.: Nauka, 1968.
26. Maksimov M.V., Merkulov V.I. Sistem pelacakan radio-elektronik. Sintesis dengan metode teori kendali optimal. -M.: Radio dan Komunikasi, 1990, 255 hal.
27. Kameda N., Matsuzaki T., Kosuge Y. Pelacakan Target untuk Manuver Target Menggunakan Filter Beberapa Model // IEEE Trans. Dasar-dasar, jilid. E85-A, No.3, 2002, hal. 573-581.
28. Bar-Shalom Y., Birmiwal K. Filter Dimensi Variabel untuk Pelacakan Target Manuver // IEEE Trans, pada AES 18, No. 5, 1982, hal. 621 - 629.
29. Schooler S. C. Filter ap Optimal Untuk Sistem dengan Ketidakakuratan Pemodelan // IEEE Trans, pada AES - 11, No. 6, 1975, hal. 1300-1306.
30. Kerim Demirbas. Pelacakan Target Manuver dengan Pengujian Hipotesis // IEEE Trans, pada AES 23, No. 6, 1987, hal. 757 - 765.
31.Michael Greene, John Stensby. Pengurangan Kesalahan Penunjuk Target Radar Menggunakan Extended Kalman Filtering // IEEE Trans, pada AES 23, No. 2, 1987, hal. 273 -278.
32. McAulay R. J., Denlinger E. A. Pelacak Adaptif Pengarah Keputusan // IEEE Trans, pada AES 9, No. 2, 1973, hal. 229 - 236.
33. Bar-Shalom Y., Fortmann T. E. Asosiasi data pelacakan. Boston: Academic Press, 1988, 353 hal.
34. Kalata P. R. Indeks Pelacakan: parameter umum untuk pelacak target P dan a - p -y // IEEE Trans, pada AES - 20, No. 2, 1984, hal. 174 - 182.
35. Bhagawan V. K., Polge R. J. Kinerja Filter g-h Untuk Melacak Target Manuver/ IEEE Trans, pada AES-10, No. 6, 1974, hal. 864 866.
36. Ackerson Guy A., Fu K. S. Tentang Estimasi Keadaan di Lingkungan Switching // IEEE Trans, pada AC-15, No. 1, Februari 1970, hal. 10 17.
37. Bar-shalom Y., Chang K.C., Blom H.A.Melacak Target Manuver Menggunakan Estimasi Input Versus Algoritma Beberapa Model yang Berinteraksi // IEEE Trans, pada AES-25, No. 2, Maret 1989, hal. 296.300.
38. Wen-Rong Wu, Peen-Pau Cheng, Algoritma IMM Nolinier untuk Pelacakan Target Manuver // IEEE Trans, pada AES-30, No. 3, Juli 1994, hal. 875 -885.
39. Jiin-an Guu, Che-ho Wei. Pelacakan Target Manuver Menggunakan Metode IMM pada Frekuensi Pengukuran Tinggi // IEEE Trans, pada AES-27, No. 3, Mei 1991, hal. 514-519.
40. Blom H. A., Bar-shalom Y. Algoritma Model Berganda yang Berinteraksi untuk Sistem dengan Koefisien Peralihan Markovian // IEEE Trans, pada AC-33, No. 8, Agustus 1988, hal. 780-783.
41. Mazor E., Averbuch A., Bar-shalom Y., Dayan J. Metode Beberapa Model yang Berinteraksi dalam Pelacakan Target: Sebuah Survei // IEEE Trans, pada AES-34, No. 1, 1998, hal. 103-123.
42. Benedict T.R., Borderner G.R. Sintesis seperangkat persamaan pemulusan jalur radar yang optimal // IRE Trans, pada AC-7, Juli 1962, hal. 27 32.
43. Chan Y. T., Hu A. G. C., Plant J. B. A Kalman Filter Based Tracking Scheme dengan Estimasi Input // IEEE Trans, pada AES 15, No. 2, Juli 1979, hal. 237 - 244.
44. Chan Y. T., Plant J. B., Bottomley J. R. T. A Kalman Tracker Dengan Skema dengan Penaksir Input // IEEE Trans, pada AES 18, No. 2, 1982, hal. 235 - 240.
45. Bogler P. L. Melacak Target Manuver Menggunakan Estimasi Input // IEEE Trans, pada AES 23, No. 3, 1987, hal. 298 - 310.
46. Steven R. Rogers. Filter Alpha Beta Dengan Pengukuran Kebisingan Berkorelasi // IEEE Trans, pada AES - 23, No. 4, 1987, hal. 592 - 594.
47. Baheti R. S. Pendekatan Efisien Filter Kalman untuk Pelacakan Target // IEEE Trans, pada AES 22, No. 1, 1986, hal. 8 - 14.
48. Miller K. S., Leskiw D. M. Estimasi Nonlinier Dengan Pengamatan Radar // IEEE Trans, pada AES 18, No. 2, 1982, hal. 192 - 200.
49. Murat E. F., Atherton A. P. Manuver pelacakan target menggunakan model kecepatan putaran adaptif dalam algoritma IMM // Prosiding Konferensi ke-35 tentang Keputusan & Pengendalian. 1996, hal. 3151 -3156.
50. Alouani A. T., Xia P., Rice T. R., Blair W. D. Tentang Optimalitas Estimasi Keadaan Dua Tahap dengan Adanya Bias Acak // IEEE Trans, pada AC 38, No. 8, 1993, hal. 1279-1282.
51. Julier S., Uhlmann J., Durrant- Whyte H. F. Metode Baru untuk Transformasi Nonlinier Mean dan Kovarian dalam Filter dan Estimator // IEEE Trans, pada AC 45, No. 3, 2000, hal. 477 - 482.
52. Farina A., Ristic B., Benvenuti D. Melacak Target Balistik: Perbandingan Beberapa Filter Nonlinier // IEEE Trans, pada AES 38, No. 3, 2002, hal. 854 - 867.
53. Xuezhi wang, Subhash Challa, Rob Evans. Teknik Gating untuk Manuver Pelacakan Target di Clutter // IEEE Trans, pada AES 38, No. 3, 2002, hal. 1087 -1097.
54. Doucet A., Ristic B. Estimasi Keadaan Rekursif untuk Beberapa Model Switching dengan Probabilitas Transisi yang Tidak Diketahui // IEEE Trans, pada AES 38, No. 3, 2002, hal. 1098-1104.
55. Willett B., Ruan Y., Streit R. PMHT: Masalah dan Beberapa Solusi // IEEE Trans, pada AES 38, No. 3, 2002, hal. 738 - 754.
56. Watson G. A., Blair W. D. Interacting Acceleration Compensation Algorithm Untuk Melacak Target Manuver // IEEE Trans, pada AES -31, No. 3, 1995, p. 1152-1159.
57. Watson G. A., Blair W. D. Interaksi Algoritma Model Bias Berganda dengan Aplikasi untuk Melacak Target Manuver // Prosiding Konferensi ke-31 tentang Pengambilan dan Pengendalian. Desember 1992, hal. 3790 3795.
58. Kameda H., Tsujimichi S., Kosuge Y. Perbandingan Beberapa Filter Model Untuk Pelacakan Target Manuver // SICE 2000, hal. 55 60.
59. Kameda H., Tsujimichi S., Kosuge Y. Pelacakan Target di Bawah Lingkungan Padat menggunakan Pengukuran Kecepatan Rentang // SICE 1998, hal. 927 - 932.
60. Rong Li X., Bar-Shalom Y. Prediksi Kinerja Algoritma Model Berganda yang Berinteraksi // IEEE Trans, pada AES 29, No. 3, 1993, hal. 755 - 771.
61. Ito M., Tsujimichi S., Kosuge Y. Melacak Target Bergerak tiga dimensi dengan Pengukuran Sudut dua dimensi dari Beberapa Sensor Pasif // SICE 1999, hal. 1117-1122.
62. De Feo M., Graziano A., Miglioli R., Farina A. IMMJPDA versus MHT dan Kalman Filter dengan korelasi NN: perbandingan kinerja// IEE Proc. Radar, Navigasi Sonar, Vol. 144, No. 2, April 1997, hal. 49 56.
63. Lerro D., Bar-Shalom Y. Menginteraksikan Pelacakan Beberapa Model dengan Fitur Amplitudo Target // IEEE Trans, pada AES 29, No. 2, 1993, hal. 494 - 509.
64. Jilkov V.P., Angelova D.S., Semerdjiev TZ. A. Desain dan Perbandingan Algoritma IMM Adaptif Mode-Set untuk Pelacakan Target Manuver // IEEE Trans, pada AES 35, No. 1, 1999, hal. 343 - 350.
65. He Yan, Zhi-jiang G., Jing-ping J. Desain Algoritma Model Berganda Berinteraksi Adaptif // Prosiding Konferensi Kontrol Amerika, Mei 2002, hal. 1538-1542.
66. Buckley K., Vaddiraju A., Perry R. Algoritma Pemangkasan/Penggabungan Baru untuk Pelacakan Multitarget MHT // Konferensi Radar Internasional IEEE 2000, hal. 71 -75.
67. Pembaruan Bar-Shalom Y. dengan Pengukuran Di Luar Urutan dalam Melacak Solusi Tepat // IEEE Trans, pada AES 38, No. 3, 2002, hal. 769 - 778.
68. Munir A., Atherton A. P. Manuver pelacakan target menggunakan model kecepatan putaran yang berbeda dalam algoritma IMM // Proceedings of the 34th Conference on Decision & Control, 1995, p. 2747 2751.
69. Bar-Shalom (Ed.) Y. Pelacakan multitarget-multisensor: Aplikasi tingkat lanjut. Jil. I. Norwood, MA: Rumah Artech, 1990.
70. Bar-Shalom (Ed.) Y. Pelacakan multitarget-multisensor: Aplikasi tingkat lanjut. Jil. II. Norwood, MA: Rumah Artech, 1992.
71. Blackman S. S. Pelacakan Beberapa Target dengan Aplikasi Radar. Norwood, MA: Rumah Artech, 1986.
72. Campo L., Mookerjee P., Bar-Shalom Y. Estimasi Keadaan untuk Sistem dengan Peralihan Model Markov Bergantung Waktu Tinggal // IEEE Trans, pada AC-36, No. 2, 1991, hal. 238-243.
73. Sengupta D., litis R. A. Solusi Neural untuk Masalah Asosiasi Data Pelacakan Multitarget // IEEE Trans, pada AES 25, No. 1, 1989, hal. 96 - 108.
74. Merkulov V.I., Lepin V.N.Sistem kontrol radio penerbangan. 1996, hal. 391.
75. Perov A.I.Algoritma adaptif untuk melacak target manuver // Teknik radio, No.7, 2002, hal. 73 81.
76. Kanashchenkov A. I., Merkulov V. I. Perlindungan sistem radar dari gangguan. - M.: “Teknik Radio”, 2003.
77. Qiang Gan, Chris J.Harris. Perbandingan Dua Metode Penggabungan Pengukuran untuk Penggabungan Data Multisensor Berbasis Kalman-Filter // IEEE Trans, pada AES 37, No. 1, 2001, hal. 273-280.
78. Blackman S., Popoli R. Desain dan Analisis Sistem Pelacakan Modern. Rumah Artech, 1999, 1230 hal.
79. Neal S. R. Diskusi tentang “Hubungan parametrik untuk prediktor filter a-^-y” // IEEE Trans, pada AC-12, Juni 1967, hal. 315 316.
80. Repin V. G., Tartakovsky G. P. Sintesis statistik dalam ketidakpastian apriori dan adaptasi sistem informasi. M.: “Radio Soviet”, 1977, 432 hal.
81. Stratonovich R. L. Prinsip teknik adaptif. M.: Burung hantu. radio, 1973, 143 hal.
82. Tikhonov V.I., Teplinsky I.S.Pelacakan objek manuver yang kuasi-optimal // Teknik radio dan elektronik, 1989, T.34, No.4, hal. 792-797.
83. Perov A.I. Teori statistik sistem radio. tutorial. -M.: Teknik Radio, 2003.
84. Darymov Yu.P., Kryzhanovsky G.A., Solodukhin V.A., Kivko V.G., Kirov B.A. Otomatisasi proses kontrol lalu lintas udara. M.: Transportasi, 1981, 400 hal.
85. Anodina T.G., Kuznetsov A. A., Markovich E. D. Otomatisasi kontrol lalu lintas udara. M.: Transportasi, 1992, 280 hal.
86. Bakulev P.A., Sychev M.I., Nguyen Chong Lyu. Melacak target manuver menggunakan algoritma multimodel interaktif // Jurnal elektronik, No. 9, 2002 Prosiding MAI.
87. Bakulev P.A., Sychev M.I., Nguyen Chong Lyu. Studi tentang algoritma untuk menyaring lintasan target radar manuver // Pemrosesan sinyal digital dan penerapannya, Laporan Konferensi Internasional ke-5. M.: 2003, T. 1. - hal. 201 - 203.
88. Bakulev P.A., Sychev M.I., Nguyen Chong Lyu. Algoritma multi-model untuk melacak lintasan target manuver berdasarkan data radar pengawasan // Teknik radio, No. 1, 2004.
89. Nguyen Chong Luu. Sintesis algoritma multi-model untuk melacak lintasan target manuver // Instrumentasi dirgantara, No. 1, 2004.
90. Nguyen Chong Luu. Studi algoritma multi-model untuk menyaring lintasan target radar manuver // Abstrak laporan, konferensi dan pameran internasional “Aviation and Cosmonautics 2003”, MAI 2003.
Harap dicatat bahwa teks ilmiah yang disajikan di atas diposting untuk tujuan informasi saja dan diperoleh melalui pengenalan teks disertasi asli (OCR). Oleh karena itu, mereka mungkin mengandung kesalahan yang terkait dengan algoritma pengenalan yang tidak sempurna. Tidak ada kesalahan seperti itu pada file PDF disertasi dan abstrak yang kami sampaikan.
Radar deteksi serba (SAR) dirancang untuk memecahkan masalah pencarian, deteksi dan pelacakan target udara, serta penentuan kewarganegaraannya. Sistem radar menerapkan berbagai prosedur peninjauan yang secara signifikan meningkatkan kekebalan kebisingan, kemungkinan mendeteksi target yang tidak terlalu mencolok dan berkecepatan tinggi, dan kualitas pelacakan target yang bermanuver. Pengembang radar adalah Lembaga Penelitian Teknik Instrumen.
Titik kendali tempur (CCP) dari sistem pertahanan udara sebagai bagian dari pengelompokan melakukan, dengan menggunakan informasi koordinat SAR, inisiasi dan pelacakan rute target yang terdeteksi, penemuan rencana serangan udara musuh, distribusi target antar pertahanan udara. sistem dalam kelompok, penerbitan penetapan sasaran sistem pertahanan udara, interaksi antar sistem pertahanan udara yang melakukan operasi tempur, serta interaksi dengan kekuatan dan sarana pertahanan udara lainnya. Otomatisasi proses tingkat tinggi memungkinkan kru tempur untuk fokus pada penyelesaian tugas operasional dan operasional-taktis, memanfaatkan sepenuhnya keunggulan sistem manusia-mesin. PBU memastikan operasi tempur dari pos komando yang lebih tinggi dan, bekerja sama dengan PBU, mengendalikan fasilitas kelompok tetangga.
Komponen utama sistem pertahanan udara S-ZOPMU, S-ZOPMU1:
Penerangan target multifungsi dan radar pemandu rudal(RPN) menerima dan memproses penunjukan target dari kontrol 83M6E dan melampirkan sumber informasi otonom, deteksi, termasuk. dalam mode otonom, penangkapan dan pelacakan target secara otomatis, penentuan kewarganegaraan mereka, penangkapan, pelacakan dan panduan rudal, penerangan target yang ditembakkan untuk memastikan pengoperasian kepala pelacak semi-aktif dari rudal yang dipandu.
Tap-changer yang dimuat juga menjalankan fungsi pos komando sistem rudal pertahanan udara: - menurut informasi dari PBU 83M6E, ia mengendalikan sistem pertahanan udara; - memilih target untuk penembakan prioritas; - memecahkan masalah peluncuran dan menentukan hasil penembakan; - menyediakan interaksi informasi dengan unit kontrol kontrol 83M6E.
visibilitas menyeluruh meningkatkan kemampuan pencarian sistem pertahanan udara selama operasi tempur independen, dan juga memastikan deteksi dan pelacakan target di sektor-sektor yang karena alasan tertentu tidak dapat diakses oleh radar dan pengubah tap yang dimuat. Radar 36D6 dan detektor ketinggian rendah 5N66M dapat digunakan sebagai alat terpasang otonom.

Terlampir sarana deteksi dan penunjukan target yang otonom
Peluncur Peluncur (hingga 12) dirancang untuk penyimpanan, transportasi, persiapan pra-peluncuran, dan peluncuran rudal. Peluncur ditempatkan pada sasis self-propelled atau road train. Setiap peluncur membawa hingga 4 rudal dalam wadah pengangkut dan peluncuran. Penyimpanan rudal jangka panjang (hingga 10 tahun) disediakan tanpa tindakan pemeliharaan dan pembukaan wadah apa pun. Pengembang PU adalah Biro Desain Teknik Khusus, Biro Desain Kementerian Kesehatan Nizhny Novgorod.

Peluncur
Roket- bahan bakar padat satu tahap, dengan peluncuran vertikal, dilengkapi dengan pencari arah radio semi-aktif on-board. Pengembang utama roket ini adalah biro desain Fakel.

Kontrol 83M6E menyediakan: - deteksi pesawat, rudal jelajah di seluruh jangkauan aplikasi praktisnya dan rudal balistik dengan jangkauan peluncuran hingga 1000 km; - pelacakan rute hingga 100 target; - kontrol hingga 6 sistem pertahanan udara; - jangkauan deteksi maksimum - 300 km.

Sistem pertahanan udara S-ZOPMU1 adalah modernisasi mendalam dari S-ZOPMU dan, pada kenyataannya, merupakan penghubung transisi ke sistem generasi ketiga.
S-ZOPMU1 menyediakan: - mencapai target pada jarak 5 hingga 150 km, pada rentang ketinggian 0,01 hingga 27 km, kecepatan mencapai target hingga 2800 m/detik; - kekalahan rudal balistik non-strategis dengan jangkauan peluncuran hingga 1000 km pada jarak hingga 40 km ketika menerima penunjukan target dari kontrol 83M6E; - penembakan simultan hingga 6 target dengan panduan hingga 2 rudal pada setiap target; dalam jenis rudal dasar - 48N6E; - laju tembakan 3-5 detik.
Jika diperlukan, sistem pertahanan udara S-ZOPMU1 dapat dimodifikasi menggunakan rudal 5V55 dari sistem S-ZOPMU.
Pendiri keluarga S-ZOOP, sistem pertahanan udara S-ZOPMU, menyediakan:-> mengenai sasaran pada jarak 5 hingga 90 km, pada kisaran ketinggian 0,025 hingga 27 km, kecepatan sasaran mencapai hingga 1150 m/detik; - penghancuran target balistik dengan jangkauan peluncuran hingga 300 km pada jarak hingga 35 km dengan penetapan target dari peralatan kendali; - penembakan simultan hingga 6 target dengan panduan hingga 2 rudal pada setiap target; - tipe dasar rudal 5V55; - laju tembakan 3-5 detik.
ALTEK-300
Kompleks pendidikan dan pelatihan
|
|
|




Manuver target di bidang horizontal berarti mengubah arah dan kecepatan terbang. Pengaruh manuver sasaran udara pada tahap pertama dan kedua bimbingan pesawat tempur dengan menggunakan metode “Manuver” memanifestasikan dirinya dalam berbagai cara.
Mari kita asumsikan bahwa bimbingan dilakukan pada tahap pertama, ketika sasaran udara dan pesawat tempur masing-masing berada pada titik DI DALAM Dan A (Gbr. 7.9.), dan pertemuan mereka dapat terjadi pada saat itu S tentang .
Beras. 7.9. Pengaruh manuver target pada bidang horizontal
di jalur penerbangan seorang pejuang
Jika target udara berada pada titik tersebut DI DALAM arah dan waktu yang bermanuver T berbelok ke sudut w t , maka agar petarung mengikuti garis singgung busur belokan bimbingan tahap kedua, lintasannya harus berubah pada suatu sudut pada saat yang bersamaan. w dan t . Setelah target udara menyelesaikan manuvernya, pertemuan dengannya akan dimungkinkan di titik tersebut DENGAN , dan panjang jalur target udara menuju titik tersebut akan berubah menjadi DSc.
Jika kita membayangkan bahwa titik awal belokan bergerak bersama dengan TC, terletak relatif terhadapnya pada interval dan jarak yang sama dengan petarung pada saat memulai belokan, maka petarung diarahkan ke titik ini dengan menggunakan metode “Paralel Pendekatan”. Jika CC berada pada jarak yang jauh Sebelum dari seorang petarung, dibandingkan dengan intervalnya SAYA dan jarak belok preemptive Dupr dapat diabaikan, maka secara umum sifat-sifat metode “Manuver” mendekati sifat-sifat metode “Pendekatan Paralel”.
Untuk pertemuan petarung nanti dengan target (DSc > 0) menuntunnya untuk berpaling dari petarung itu (LakukanΘ dan > 0) , dan berbalik ke arah petarung mengarah ke pertemuan sebelumnya. Oleh karena itu, tindakan untuk menangkal manuver arah sasaran, seperti halnya panduan menggunakan metode “Pendekatan Paralel”, dapat berupa penargetan kelompok pejuang secara bersamaan dari arah yang berbeda.
Ketika jarak ke TC berkurang, perbedaan antara sifat-sifat metode “Manuver” dan sifat-sifat metode “Pendekatan Paralel” menjadi semakin jelas. Selama waktu memutar VT, pesawat tempur perlu berbelok dengan sudut yang semakin besar, yaitu kecepatan sudutnya w meningkat.
Perubahan nilai w dan ketika seorang pesawat tempur terbang pada jalur tabrakan dengan target udara (UR = 180°) mencirikan grafik hubungan antara kecepatan sudut w dan / wc dari jangkauan, dinyatakan dalam pecahan jarak putaran timah D/Dupr.
Seperti terlihat dari grafik, pada jarak yang jauh (D/Dupr = 5÷ 10) sikap w dan / wc sedikit berbeda dari kesatuan, yaitu kecepatan sudut pesawat tempur sedikit berbeda dengan kecepatan sudut target yang bermanuver. Dengan penurunan jangkauan, menjadi sekitar tiga Super , nilai wi tumbuh secara intensif, dan ketika petarung mendekati titik awal belokan (D/Dupr = 1)w dan meningkat hingga tak terhingga.
Oleh karena itu, ketika membidik menggunakan metode “Manuver” pada CC yang sedang bermanuver, hampir tidak mungkin untuk membawa pesawat tempur ke titik di mana belokan dimulai dengan radius yang dihitung.

Beras. 7.10. Ketergantungan rasio kecepatan sudut w dan / wc saat melakukan manuver pada sasarannya
pada bimbingan tahap pertama sehubungan dengan D/Dupr
Selama proses pemanduan tahap pertama, sasaran udara dapat bermanuver berulang kali. Jadi, misalnya, sasaran udara pada suatu titik DALAM 1 dapat menghidupkan petarung, menghasilkan satu poin A1 itu harus dibelokkan dari jalur sebelumnya dan arah belokan yang direncanakan sebelumnya harus diubah. Akibatnya lintasan pesawat tempur pada tahap pertama bimbingan berubah dari garis lurus menjadi garis kompleks yang terdiri dari busur-busur putar dengan radius yang bervariasi dan ruas-ruas lurus di antara keduanya. Semua ini mempersulit pelaksanaan penerbangan ke pertempuran udara.
Kami akan mempertimbangkan pengaruh manuver target udara pada panduan pesawat tempur tahap kedua menggunakan metode “Manuver” menggunakan Gambar 7.11:

Beras. 7.11. Pengaruh manuver sasaran udara pada bidang horizontal
pada panduan tahap kedua menggunakan metode “Manuver” ke jalur penerbangan pesawat tempur
Mari kita asumsikan bahwa pada saat panduan tahap kedua, pesawat tempur dan target udara masing-masing berada pada titik A Dan DI DALAM dan untuk mencapai target pada saat itu Bersama petarung berbelok dengan radius Ro dan kecepatan sudut w dan = Vi/ Ro .
Jika untuk jangka waktu tertentu Dt target udara akan mengubah arah penerbangannya secara miring w c × Dt , maka pertemuan dengannya akan menjadi mungkin pada saat itu DENGAN . Untuk mencapai titik ini dari suatu titik A petarung harus berbelok dengan radius berbeda R . Tapi sebelumnya Dt dia juga harus berbelok di tikungan w dan D × Dt .
Dengan demikian, manuver target udara pada panduan tahap kedua menyebabkan munculnya kecepatan sudut tambahan pada putaran pesawat tempur. w dan D . Semakin kecil sudut belok yang tersisa kamu petarung, semakin besar nilainya w dan D , dan saat petarung mendekati titik akhir belokan w dan D meningkat hingga tak terhingga.
Dengan demikian, hampir tidak mungkin untuk membawa pesawat tempur ke posisi tertentu relatif terhadap target udara yang sedang bermanuver pada panduan tahap kedua menggunakan metode “Manuver”.
Dalam hal ini, dalam hal melakukan manuver target udara, pada tahap kedua, mereka biasanya beralih ke memandu pesawat tempur menggunakan metode “Pengejaran”.
 Beberapa ciri penggunaan preposisi Ciri-ciri preposisi turunan
Beberapa ciri penggunaan preposisi Ciri-ciri preposisi turunan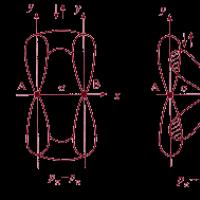 Tes kimia (kelas 8) "Struktur atom
Tes kimia (kelas 8) "Struktur atom Materi pendamping untuk slide
Materi pendamping untuk slide Agama masyarakat bule
Agama masyarakat bule Ayub yang Benar: gambaran harapan melalui penderitaan
Ayub yang Benar: gambaran harapan melalui penderitaan Turun tahta takhta Nicholas II 1894 1917 pemerintahan
Turun tahta takhta Nicholas II 1894 1917 pemerintahan Akhiran kasus ejaan dari kata benda tunggal
Akhiran kasus ejaan dari kata benda tunggal